Robolit Presents at ToRK2018
Robolit is invited to present at the ToRK 2018 conference to be held at Bogazici University from April 12-14. The talk, which was featured as the opening talk on the last day of the conference, covers standard test methods for robotic systems. Chiefly driven by our work as part of the ASTM-NIST-DHS Standard Test Methods for Response Robots we explain how standardization can foster a richer R&D ecosystem and greatly improve efficiency for the customers of such robotic systems.

Robolit Consulted Start-Up Receives $2.7M First Round

 Vence Corp., a California based start-up, received $2.7M in new funding from a group of investors led by Eniac Ventures with participation from the venture capital arm of the Dutch investment bank, Rabobank, which focuses on innovative food and agriculture technologies.
Vence Corp., a California based start-up, received $2.7M in new funding from a group of investors led by Eniac Ventures with participation from the venture capital arm of the Dutch investment bank, Rabobank, which focuses on innovative food and agriculture technologies.

Early prototype cattle mounted Vence systems.
Robolit has been working with the Vence team since the beginning of the project as a technology development consultant. In a short period of time starting late December 2016 we designed and developed several iterations of the proof of concept system. While our primary contribution was the algorithmic basis of the animal management system, our work also covered the implementation of electronic and software components that make up the prototype. We also conducted several field tests in Arizona and California with the Vence management.

A scene captured during our last field trip to San Fransisco, CA to test the Vence prototype system.
Vence aims to revolutionize cattle management with far reaching implications for food security and reduction of the ecological impact of meat production. We are extremely proud to be part of this amazing team and looking forward to future collaborations.

Engineer Position Available at New Venture
Robolit in partnership with a former FDNY firefighter is embarking to a brand new R&D project that has the potential to change the first response scene. We are looking for creative engineers with an entrepreneurial mindset to join our team.
Please, check out the job post for details and submit your information information.

Vence Saga Continues
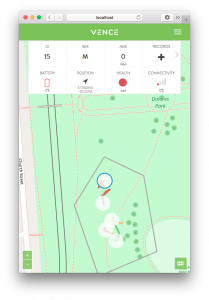
Compatibile with any web enabled device the new UI presents a clean interface to the user for herd movement management and tracking animal status.
We are back in the sunny San Fransisco, California for the fourth installation of the Vence field tests. Building on the experience and the tool set we developed in earlier tests in Point Reyes and Phoenix this time around our focus will be primarily on the algorithm development and testing rather than hardware prototyping.
In the time since our last field trip we have introduced a slick new UI for visualization and management of herd behavior which will get its first field use in this trip. In addition we will be fielding our improved data collection tools for testing and evaluation.

Third Vence Field Tests Successfully Concluded
A small herd of cattle we employed during our experiments during our work in Point Reyes. The last day of the 10-day excursion was sunny but still quite windy and cold.
We have concluded our 10-day field test for the Vence Project, which had started on April 5th. Took place in the beautiful Point Reyes National Shoreline, this third meeting of the group has been the most exciting time of our work to date. We made great discoveries and conducted very successful trials. It seems that the project will get even more exciting in the coming months.
During this trip we setup shop at two different locations: downtown San Fransisco for the initial assembly and tests; and Bolinas, CA for the day to day cattle experiments. I thank project’s media expert and consultant, Mike North, for his hospitality at his home in Bolinas and letting me turn the living room into a workshop for a few days.
Sleep and Happiness at Vence Field Trip 3
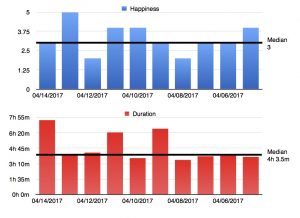
As much as the discovery process during field tests was fun, it was also quite demanding on us. The graph here shows the amount of daily sleep time over the course of the trip. As with any investigative work into uncharted territory we unavoidably come across some failures, which in turn caused disappointment. The trick in creative work is to maintain persistence in the face of such negative developments. All walls crack if you hit then with your head a sufficient number of times.

Celebrating a successful set of test in the ranch at the signature restaurant of Bolinas, CA.
At the end the trip was an astounding success in a developing new technological field of cooperative biology/machine teams. In just three months we made great strides. Deservedly, we celebrated our accomplishments with unbelievable Oysters from the Point Reyes.
We are looking forward to the next installation of our field tests!

Third Vence Field Trip Started

Robolit has arrived sunny California today to conduct the third set of field tests for the Vence cattle herd control system. Our tests will take place at a ranch near San Fransisco—a definite change in climate compared to previous trips in Arizona.
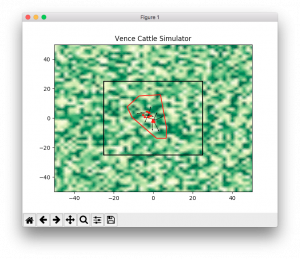
A snapshot from a simulation run where Vence herd management algorithm confines virtual cows in a polygonal virtual fence.
The preamble to this trip was the development of a simulation engine. We constructed a 2D virtual space consisting of cattle and physical fences. We build a simplified cattle behavior model as a combination of basic drives such as hunger, herd instinct and pain avoidance. Within this virtual environment we executed the Vence distributed virtual fence control algorithm to evaluate different strategies and debug the higher level decision making processes.
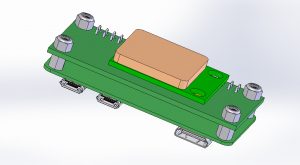
3D model of the electronics stack in the Vence Collar Prototype 3.
Previous field trips were very informative about cattle farms. These earlier experiments also showed us various ineffective design approaches in the face of realities of a cattle farm. Empowering our team with the addition of an industrial designer our third prototype is more compact, robust and easy to use. We also completely restructured the code base to produce a more streamlined and customizable distributed control architecture.
We are looking forward to running tests and with little luck we will demonstrate the efficacy of the technology we developed for Vence.

Job Openings Posted
Robolit is gearing up for a very exciting summer. We have lined up several interesting projects and are in the look out for talent to help propel these ideas into reality. Please, check out open positions an let us know if you are interested.

All Vence Team meets at the Ranch
 The entire Vence team gathers at the Hecianto Corona, the ranch where we will be conducting our experiments for the second field trip in the coming week. The desert is rather cold in the mornings but fortunately gets quite pleasant as hours pass.
The entire Vence team gathers at the Hecianto Corona, the ranch where we will be conducting our experiments for the second field trip in the coming week. The desert is rather cold in the mornings but fortunately gets quite pleasant as hours pass.

We have setup a small herd of five cattle with our brand new experimental collar in a medium size corral. Our experiment management station has a perfect vantage point allowing us to observe the herd behavior without disturbing the animals.
Robolit joins as an expert to Robolliance.com
Robolit is being featured as a resident expert on the brand new information exchange hub, Robolliance.com. Robolliance brings together a rich mix of talent from a wide spectrum of fields. The primary goal of the site is to establish an know-how critical mass that would propel robotic technologies focusing on security and surveillance applications.