Completed Initial Debugging of the Collar Stack

Our electronics assembly shop during the third Vence field trip.
In our first couple days we will be assembling and testing the collar version 3. There are mechanical, electrical and software components that were designed on separate tracks over the past month. These components are coming together today.

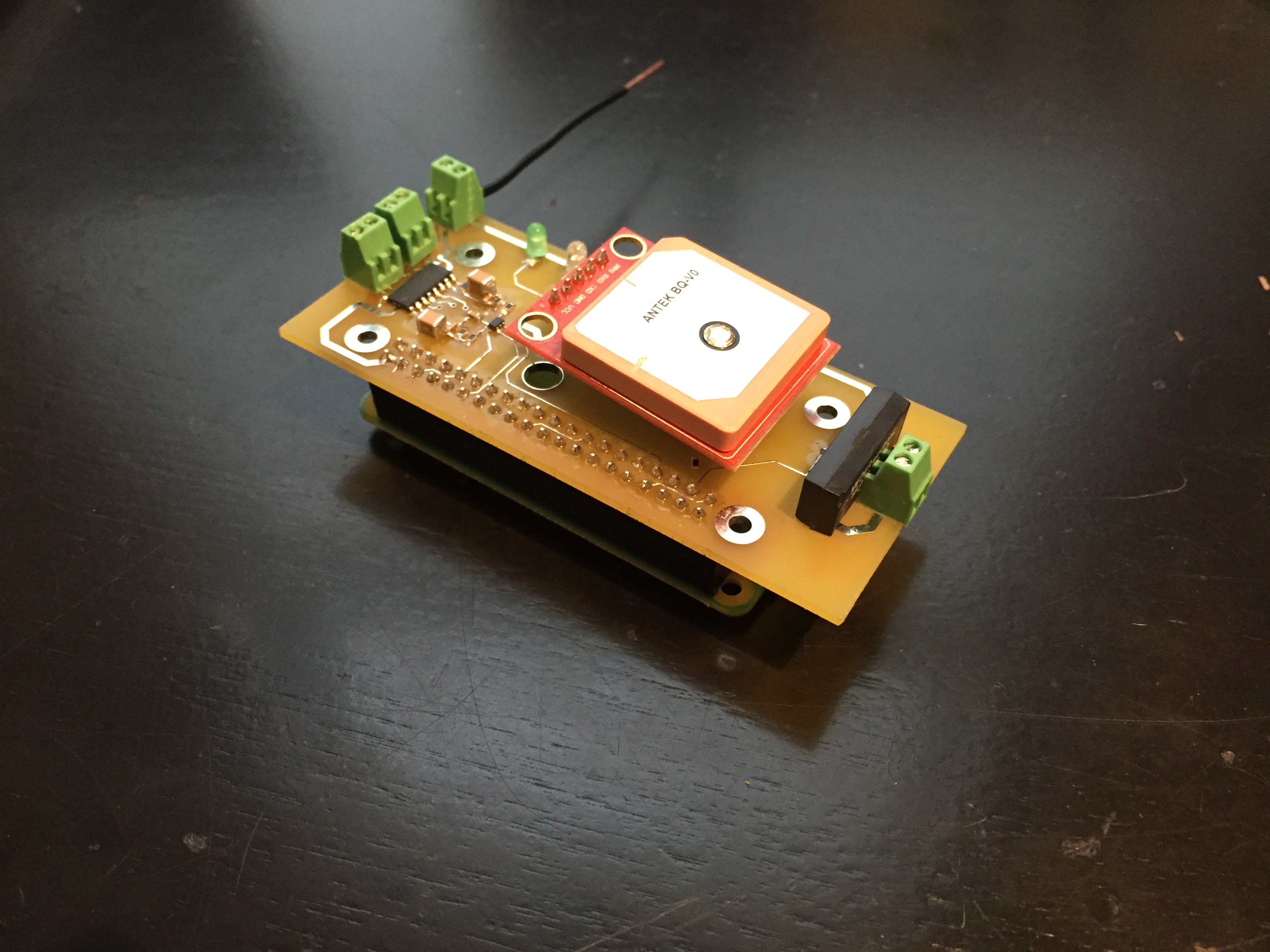
Fully assembled test stack for the Vence collar v3.
The stack consists of various sensors such as GPS. An onboard state estimator software employs all available sensors along with a crude kinematic model of a cattle to estimate its behavioral configuration.
Partially assembled electronics stack for the Vence collar v3. The bottom board is our custom design. The top board is a RPi Zero W.
The heart of the design is the behavioral control algorithm under development. In its core Vence system is a distributed control architecture. This proprietary mechanism decides how to stimulate each cattle based on global goals and local information in order to produce the desired herd level movement behavior.
Haldun administrator
Dr. Komsuoglu is a robotics expert and entrepreneur with over 20 years of research, development and start-up experience. Focusing on biologically inspired high-performance mobility and high-dexterity manipulation systems Mr. Komsuoglu served as a key personnel in several critically acclaimed multi-institutional robotics projects sponsored by Defense Advanced Research Projects Agency (DARPA), United States Army Tank Automotive Research, Development and Engineering Center (TARDEC) and National Science Foundation (NSF). Some noteworthy projects he was involved with includes DARPA-CBS, DARPA-RHex, DARPA-RiSE, NSF-FIBR and MA-UGV. In these projects Dr. Komsuoglu engaged experimental robotic research, simulation, embedded system development (hardware/software), control systems engineering and analytic studies. Since 2006 Dr. Komsuoglu has been heavily engaged in business development. He founded and ran technology start-up companies focusing on commercialization of several robotic technologies he helped develop. In 2009 he founded Robolit LLC (https://www.robolit.com) providing design consulting for academic research equipment, search and rescue systems for first responders and military applications. His current work focuses on remotely controlled UAVs with a unique UI system employing virtual reality devices with applications in first response and entertainment industry. Since 2011 Dr. Komsuoglu has been serving as an active member of the DHS-NIST-ASTM Standard Robot Test Methods committee and is responsible of development of manipulation test methods.
1 Comment so far
First Day in the Ranch to Test Vence Prototype 3 – Robolit LLCPosted on 6:19 am - Apr 9, 2017
[…] the initial tests and assembly we arrived at the Lunny Ranch where we will be conducting our field tests for the Vence system. […]
About the Author