Dr. Komsuoglu recevies patent US2011/0320042A1
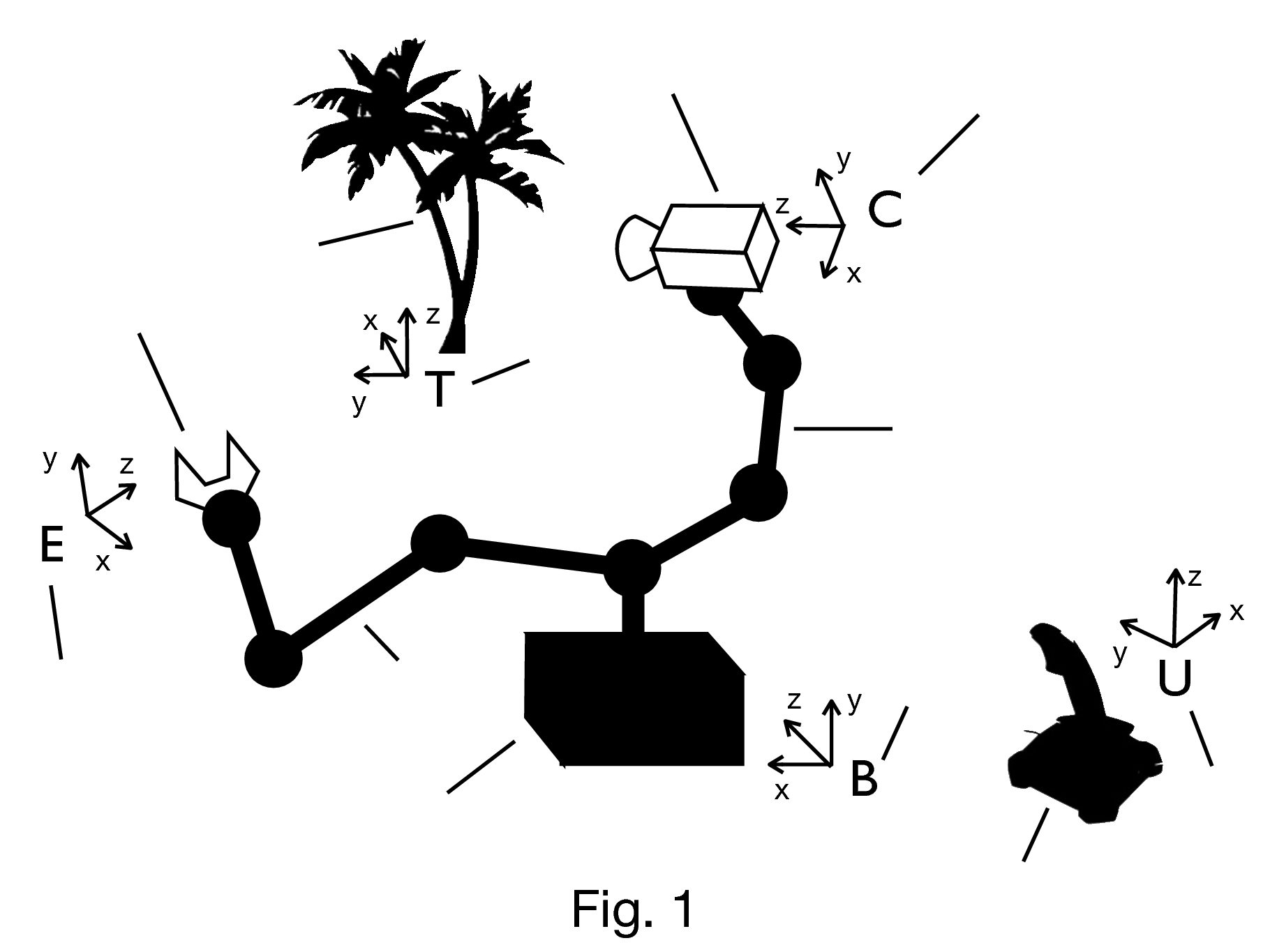
Dr. Komsuoglu has received patent US2011/0320042A1 for his earlier work in American Android Corp. This work outlines two key technologies developed for a multi-arm manipulator system: a procedure by which video feeds collected from multiple appendage mounted cameras are combined; and a mechanism that provides selectable command frame of reference. The combination of these two methods give rise to a significantly improved user experience and reduce operator fatigue. These methods were demonstrated on MA-UGV platform.
Robolit is awarded a 1-year grant by NIST
Robolit has received a 1-year grant from NIST (National Institute for Standards and Technology)to develop performance metrics for the qualitative evaluation of mobile robot manipulators for inspection, grasping and precision placement.

Raymond Sheh joins Robolit
Dr. Raymond Sheh joins Robolit. Dr. Sheh will be the lead in our NIST grant aiming to develop qualitative test metrics to evaluate mobile robots. Mr. Sheh has received his doctorate in robotics and machine learning from University of New South Wales and has been an active organizing member of the RoboCup Rescue League events.