First Week at the 3rd Vence Field Test has Passed

Lush green hills of Point Reyes where the Vence tests are conducted. Unfortunately in April such sunny days are few.
We have completed the first week of the third field tests for the Vence project. As usual the week was full of all-nighters, excitement across the team, highs and lows.
Our initial tests suffered from several logistical issues such as poor wifi connectivity and spotty GPS tracking. Further investigation revealed issues with the packaging of the the experimental collar. To identify the most effective construction we implemented three different packaging solutions and tested them in the field. We quickly converged to an effective solution that respects the issues caused by large battery in the package and the bodies of 1,500 lb animals.

Crossing the Golden Gate Bridge in a overcast and drizzly weather on our way to the test ranch.
Unfortunately, the weather during the first week was not very agreeable. While the Point Reyes offers an exquisite natural expanse, the overcast and windy conditions made it hard to execute tests. Combining this with the needed to move back and forth a not-always-agreeable herd of cattle in mud made our days quite demanding. However, looking back just three months ago when this project started, I would say we are fast becoming seasoned cowboys. Yeehaw!

Celebrating a successful set of test in the ranch at the signature restaurant of Bolinas, CA.
Cattle movement behavior is dictated by a few drives, such as hunger and herd attraction. While our goal is to manage herd movement in general settings, our initial investigative and debugging tests focus on simplified settings where a single animal is managed and observed. After successfully testing our sensory and stimulation subsystems on animals we started with a series of simple management scenarios where the stimulation decisions were made manually. These settings allowed us to evaluate our hypotheses about the best way to influence cattle movement decisions. As with any scientific process some of our ideas were refuted in this experimental process, and we discovered some new insights. Though, I am happy to report that we did observe repeatable and predictable relationship between our control actions and animal’s movement, which will serve as the build block of the ultimate mechanism.

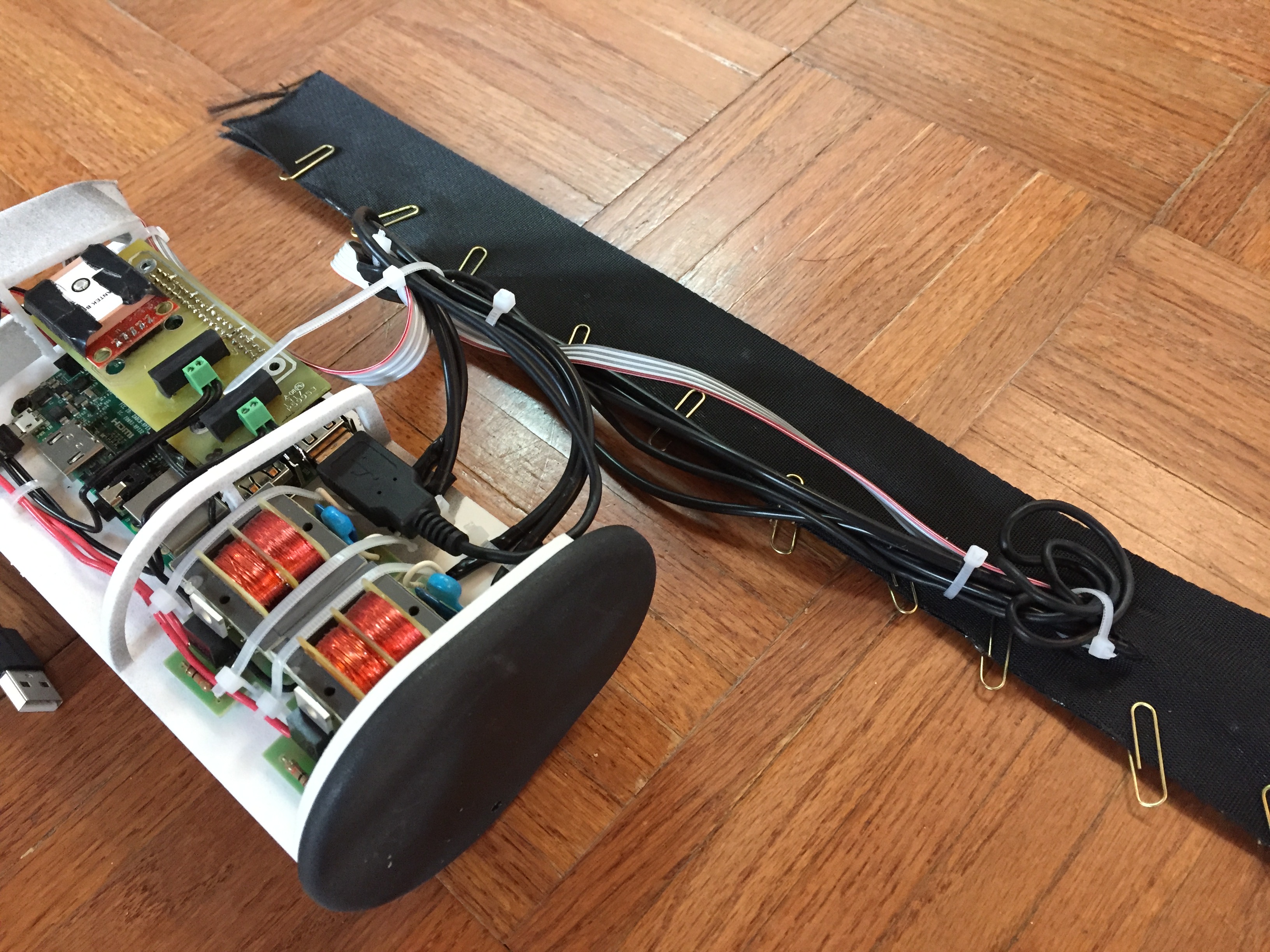
Revised experimental Vence collar hardware during assembly process.
One of these observations in the initial manual experiments suggested a fundamental change in the hardware. The last couple days were spent on construction of this new setup, modification of the code base accordingly and repeat of the tests. Again the results were quite promising.
As we are entering the second week of the field tests we are preparing for the debut of the autonomous cattle management system. Again we will start with single animal settings where the animal will be geographically constrained in virtual fence lines. Next, we will move to groups of animals. The movement management in the context of complex herd dynamics is an uncharted territory. We are confident that the problem is solvable but probably more sleepless nights await us.
Haldun administrator
Dr. Komsuoglu is a robotics expert and entrepreneur with over 20 years of research, development and start-up experience. Focusing on biologically inspired high-performance mobility and high-dexterity manipulation systems Mr. Komsuoglu served as a key personnel in several critically acclaimed multi-institutional robotics projects sponsored by Defense Advanced Research Projects Agency (DARPA), United States Army Tank Automotive Research, Development and Engineering Center (TARDEC) and National Science Foundation (NSF). Some noteworthy projects he was involved with includes DARPA-CBS, DARPA-RHex, DARPA-RiSE, NSF-FIBR and MA-UGV. In these projects Dr. Komsuoglu engaged experimental robotic research, simulation, embedded system development (hardware/software), control systems engineering and analytic studies. Since 2006 Dr. Komsuoglu has been heavily engaged in business development. He founded and ran technology start-up companies focusing on commercialization of several robotic technologies he helped develop. In 2009 he founded Robolit LLC (https://www.robolit.com) providing design consulting for academic research equipment, search and rescue systems for first responders and military applications. His current work focuses on remotely controlled UAVs with a unique UI system employing virtual reality devices with applications in first response and entertainment industry. Since 2011 Dr. Komsuoglu has been serving as an active member of the DHS-NIST-ASTM Standard Robot Test Methods committee and is responsible of development of manipulation test methods.
About the Author